

一文带你了解AGV的导航方式



随着AGV智能物流机器人的应用越来越广泛,如何选择合适的AGV产品就成为了用户迫切需要了解的问题。其中,导航方式作为AGV的一项核心技术,更是受到了广泛关注。本文就对当下AGV应用的几种不同导航方式进行梳理,以期能够给大家提供帮助。
目前,常见的AGV导航方式主要有以下几种,分别有着不同的适用场景和特点:
磁条导航

在路面上铺设磁条,通过磁导航传感器不间断感应磁信号来实现AGV的导航。
优点为技术成熟可靠,成本较低,铺设实施较为简单。缺点是要提前施工;磁条容易受损和污染,需定期维护;且AGV行驶路线无法便捷调整,灵活性差。
磁钉导航

同样是通过磁导航传感器感应磁信号来进行导航,不同的是将之前的磁条连续感应替代为磁钉间隔感应,AGV行进路径由磁钉连线确定。
优点为技术成熟可靠,成本较低;隐蔽性较好,不易被损坏。缺点是需提前开凿预埋,施工成本高;灵活性差,后期变更成本高;磁钉间隔区域存在不稳定性,不适应人机共融环境;且在重载场景下,磁钉容易被损坏,更换困难。
二维码导航

由二维码替代磁钉的导航方式,典型应用为亚马逊kiva机器人,实现了“货到人”的拣选模式。
优点为AGV运行准确,铺设成本低,路径调整较为方便;不足之处在于二维码容易污损,需定期维护;应用柔性低,无法适应人机共融环境;同时对作业环境(如无尘室)和地面平整度等客观条件有一定要求。
激光反射板导航

在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过激光扫描器发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和航向,并通过连续的三角几何运算来实现AGV的导引。
优点为地面无需施工,AGV行驶路线灵活。不足之处在于需要提前按照一定要求铺设反射板,成本较高;适用于周边无遮挡的作业环境。
激光SLAM导航

无需二维码、反射板等辅助导航标志,而是通过工作场景的自然环境(比如柱子、墙面等)作为参照物,实现定位导航。
优点在于无需硬件施工,部署成本低;且能够实现灵活的停障避障和人机共融作业;AGV行驶路径灵活多变,并可通过软件进行动态编辑,满足柔性生产需要;但在应用中也存在一些弊端,比如在高动态或类似透明、镜面等环境中作业时,容易出现定位丢失的情况。
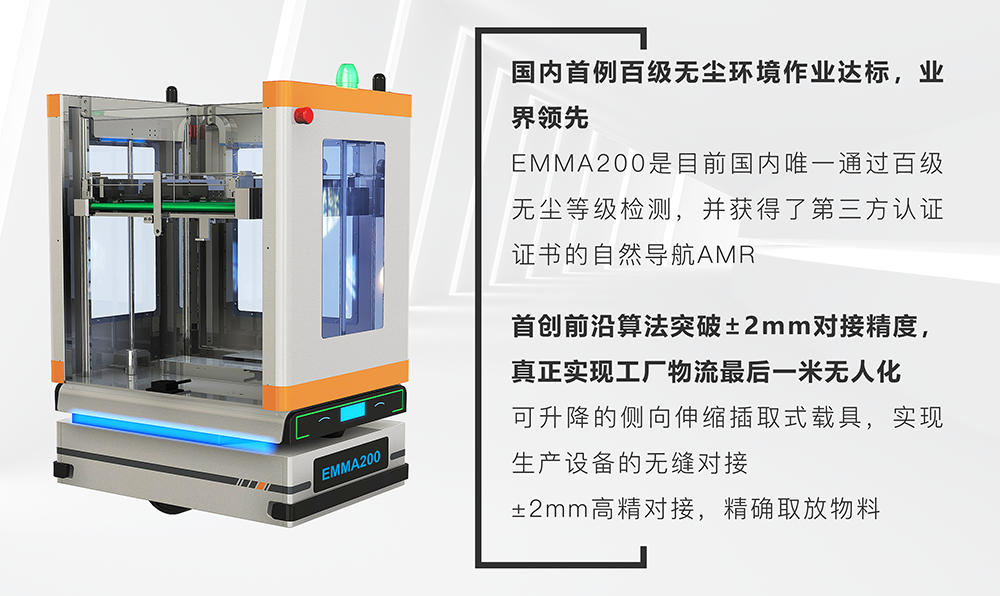
迦智激光SLAM导航AGV的性能特点和优势

当下,迦智的激光无轨导航AGV已经在包括电子信息、汽车与汽配、电力成套、医药、新能源、纺织服装等多行业有了成熟的应用案例,助力企业精益生产管理,提升运作效率,真正实现智能工厂。













 浙公网安备 33010802011917号
浙公网安备 33010802011917号